Michele Oliosi
-
Posts
758 -
Joined
-
Last visited
11 Followers










-
Automatic mode will select the tracker with the highest GCR as reference. It is an alternative way to select the tracker pair. If you deselect the tracker pair, the parameters shown in Pitch, collector width, etc. can be manually adjusted.
-
This is a bug, I have created a ticket to address it. In past versions, it used to be present in the report.
-

Simulating multiple orientations in a single subarray
Michele Oliosi replied to Jason Brandt's topic in Shadings and tracking
Sorry, this warning is not appropriate in your setting, we still need to address the way it is triggered so that it becomes more relevant. I think it was added with the case of different nominal orientations in mind. But currently, for your case, i.e., one nominal orientation with many variations due to the topography, the way to go is: use only one orientation. This has one drawback: the averaging error and the mismatch caused by the individual orientations are not taken into account, i.e., on this end the calculation is a bit optimistic. But since our calculation is already conservative in other ways (e.g., backtracking modeling), I do not think this small underestimation of losses is critical. In the future, we want to account for these two losses we are yet missing. -
Hi @Cole Noble, If you import hourly GHI data into PVsyst meteonorm or DirInt are not used for DHI. Instead, the Erbs model is used. However, the meteonorm generation is likely used for the ambient temperature if it is not present in your data?
-
Multi-orientation daily-sharing with several onduleur same reference
Michele Oliosi replied to tommm's topic in Simulations
Hi @tommm, no indeed, as you have understood, there is no way to organize per inverters in this interface. However, the solution you hinted at should work. I.e., you can define different inverters and open the window “Multi-orientation daily sharing” from sub-arrays with the three different inverters respectively. Make sure everything is checked. -
Dear Sofia, Yes indeed, this is a bug we have in the current version. The bifacial model does not handle 0° tilts anymore. This will be fixed in the next patch 8.0.14. Sorry for the inconvenience..
-
Hi, you need to enter the 3D scene and modify your PV objects to define partitions on them. Here is a help page with some guidelines on this: https://www.pvsyst.com/help/project-design/shadings/electrical-shadings-module-strings/partition-in-strings-of-modules.html
-
How is the PV system size determined?
Michele Oliosi replied to Chae Han Lee's topic in Shadings and tracking
Hi, This is an order of magnitude estimate, so we did not feel the need to be too precise. To be on the safe side: you can work with twice the distance from the center of the PV site to the edge. -
Yes, that is also another option, especially since you have a ready-to-use MEF file. 🙂 To address the original issue: There was an issue with the units and multipliers, which were not defined correctly. This fixed the error of the clearness index.
-
Bifacial model not working for single tables in PVsyst 8
Michele Oliosi replied to Miguel G's topic in Simulations
Hi, It was indeed possible to define situations with only a single row + 3D scene + bifacial model in previous patches. However, this was not the intended behavior and was a possibility that was exposed by a bug. We would not be able to guarantee that the calculations were properly handled in this situation. We have recently corrected some issues in terms of number of rows, and that has had the effect that the above unwanted exposure was corrected as well. Currently, the calculation with a single row in an orientation (such as your orientations 2, 3, 4, and 5) can only natively be realized with an unlimited orientation. There are therefore two workarounds: Model orientations 2-5 as unlimited orientations with one row. Duplicate the 3D tables from orientations 2-5 and any objects that may shade them. The duplicates should be placed far enough on the scene so that there are no unwanted interactions. In this way, PVsyst recognizes two rows instead of one. Since they are sufficiently spaced, mutual shading effects are negligible. You may need to alter the following advanced parameters (Home window > Settings > Edit advanced parameters) to avoid some problems with a larger scene than the modules defined in the system window This solution does not work with Module Layout definitions (because these necessitate a perfect match between 3D scene and system) Please note that supporting 1 row bifacial orientations is in our internal roadmap, and I will rebound on your request with discsssions to see whether we can anticipate this feature a little.
-
Hello ! Regarding the snow data, actually the snow depth time series data is not used by the simulation in PVsyst. Instead, the impact of snow is present via the albedo factor (monthly). Typically, if snow is present on the ground, the albedo factor is between 0.4 and 0.8. You could check how many days are snowy in a given month, and proportionally increase the albedo. For the warning on the clearness data, we would need to take a look at the data. Can you send the data and MEF file to support@pvsyst.com? Else, you can share a screenshot of "Best clear days Ktcs" graph and "Monthly best clear days"? That will also help.
-
This is a good remark, it will be useful for many users. In principle, we do recommend trying to group orientations into fewer average orientations. Usually, orientations should fall into an average whenever there are identical nominal orientations (for example, despite the irregularities caused by a complex terrain), or when they fall into the same DC array, which will facilitate the “System” window definitions. When there are notable differences, such as different ground types, backtracking parameters, types of racking, etc. it may be worth keeping separate orientations, of course. This will facilitate definitions. For example, if there are different ground types, determining albedo values for each of them makes sense. However, the default behavior when importing a 3D drawing is not fully in tune with these recommendations, yet. Indeed, by default, the 3D import will separate orientations based on effective angles. Therefore, a necessary step is to regroup orientations. The simplest way is to select all concerned PV tables in the 3D scene, and then use the right-click menu to create an orientation from the selection. Any other method works here, as long as it allows for an educated grouping of orientations. We are looking into improving this default behavior at the stage of 3D import. Ideally, we want this experience to be more in line with our recommendation of grouping orientations.
-
Pitch value set in shading scene not matching pitch in report
Michele Oliosi replied to Vera's topic in Shadings and tracking
PVsyst usually takes the minimum pitch as default value for the backtracking algorithm. If only one of your trackers has a pitch of 6.24 this may explain what you observe. Note that you can anyway override the backtracking parameters from the 3D scene > Tools menu > Backtracking management. -
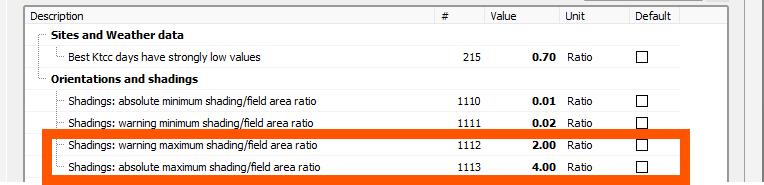
Two corrections impacting electrical shading results Release note: Shadings: the bottom cell size is now taken into account also when computing the shading factor table from the Near shadings window. Between versions 8.0.0 and 8.0.11, the bottom cell width was not available in the Near shadings window calculations. Therefore, recomputing the shading factor tables by clicking the “Recompute” button, or computing the tables when prompted when closing the Near shadings window could lead to slightly incorrect results, especially for low sun heights. Version 8.0.13 corrects this bug. Shading factor table calculations will be consistent no matter where they were called from. If you were using the "according to module strings" model in "Fast", it is possible that electrical shadings will slightly increase due to this correction. Release note: Shadings, thin objects: the partition model results in presence of thin objects have been corrected. This may impact the simulation results, by increasing the electrical shadings slightly in some cases. In previous patches of PVsyst 8, the electrical shading factor in the presence of thin objects, when using the fast simulation mode (table interpolation), was not calculated correctly. This could lead to an underestimate of electrical shading losses. Note that this bug was not present in version 7. Moreover (also in previous PVsyst versions), whenever the total irradiance loss was lower than the electrical shading loss from normal objects (case with many thin objects), the electrical shading loss could also be underestimated. Although very rare, this case is now corrected as well. Improvements of the bifacial view factor model Release note: Bifacial: corrected calculation of the sky diffuse contribution on the rear side of the PV modules This patch addresses several issues in the modeling of the sky diffuse on the rear side. The impact of the number of rows has been reassessed; it now better captures the fact that the rows at the extreme end of the array do not experience mutual shadings, for all diffuse components. The rear side diffuse view factor has been revised; a normalization factor now correctly depends on the tilt. A discretization effect that caused an East-West asymmetry for trackers has been fixed. These issues were most impactful in the following two cases: systems with vertical tables, and systems with few rows of tables. With this correction, the modeling of irradiance on the front and on the rear have been harmonized and generally have a better match. However, the impact on the total system output remains small, amounting to less than 0.5% for most bifacial systems. Note: Systems with a single table, or a single row of tables, can currently only be designed with “unlimited” orientations. A workaround duplicate all the elements in your 3D scene and place it sufficiently far away so that mutual shading effects are negligible. Considering the power factor in the System window for sizing assistance Release note: System design: Overload losses are now adjusted when a Power Factor is specified in “Energy Management”. When requesting an inverter to produce reactive power, its overload conditions may be impacted. This will depend on its nominal power specifications. If the nominal power (PNom) is specified as apparent power ([kVA]), a power limitation will apply in terms of active power according to the formula: PNom(active) [kW] = PNom(apparent) [kVA] × cos(φ). Since PNom(active) is lower than PNom(apparent), overload losses increase and depend on the chosen power factor (cos(φ)). Once a yearly power factor is specified, the estimation of overload losses in both the System and Sizing windows will take this effect into account, indicated as “Overload loss, with PF”. This estimation now more closely reflects the values shown in the loss diagram. Future versions will include the estimation of overload losses for monthly power factor as well. A more detailed explanation is available in the Help section: https://www.pvsyst.com/help/project-design/grid-connected-system-definition/power-factor/index.html Warning message “inverter is slightly/strongly undersized” Release note: System Sizing: warning and error messages for inverter slightly and strongly undersized are now triggered at 2% and 4% overload losses, respectively. These errors are not fatal anymore. In addition to the previous point (considering the power factor in the System window), the fatal error message “the inverter is strongly undersized” is no longer triggered at 3% overload loss. Instead, it is now issued as a warning that does not block the simulation. For new projects, the threshold for displaying this message has been updated to 4%, acknowledging that moderate inverter overloading has become a common practice. For older projects, the threshold is still set at 3%, which can be modified in the parameters of the project.
-
@Pete if you can send the zipped project (Export button in the project window) as well as your result tables (including the batch results file if you used the batch) to the email address support@pvsyst.com As usual with these investigations, comparing intermediate variables and not just the final energy gives good results in pinpointing the main effect. If ShdDLss is not the issue, then we should look at other variables before and after this point, to see if the energy increase is due to a specific loss or gain along the loss tree.